Holybro Pixhawk 6X l Sistema de Voo & GPS l Controlador de voo modular l UAVs & Drones l 11053 l 18062 l 18074 l 18066 l 18078 l 20172 l 20173 l 20295 l 20175 l Escolha seu Kit
Holybro Pixhawk 6X l Sistema de Voo & GPS l Controlador de voo modular l UAVs & Drones l 11053 l 18062 l 18074 l 18066 l 18078 l 20172 l 20173 l 20295 l 20175 l Escolha seu Kit
ESTOQUE: 51 UN
SKU: HOLYBRO.20174
R$6.865,20 à vista (via boleto bancário) ou PIX
R$7.628,00
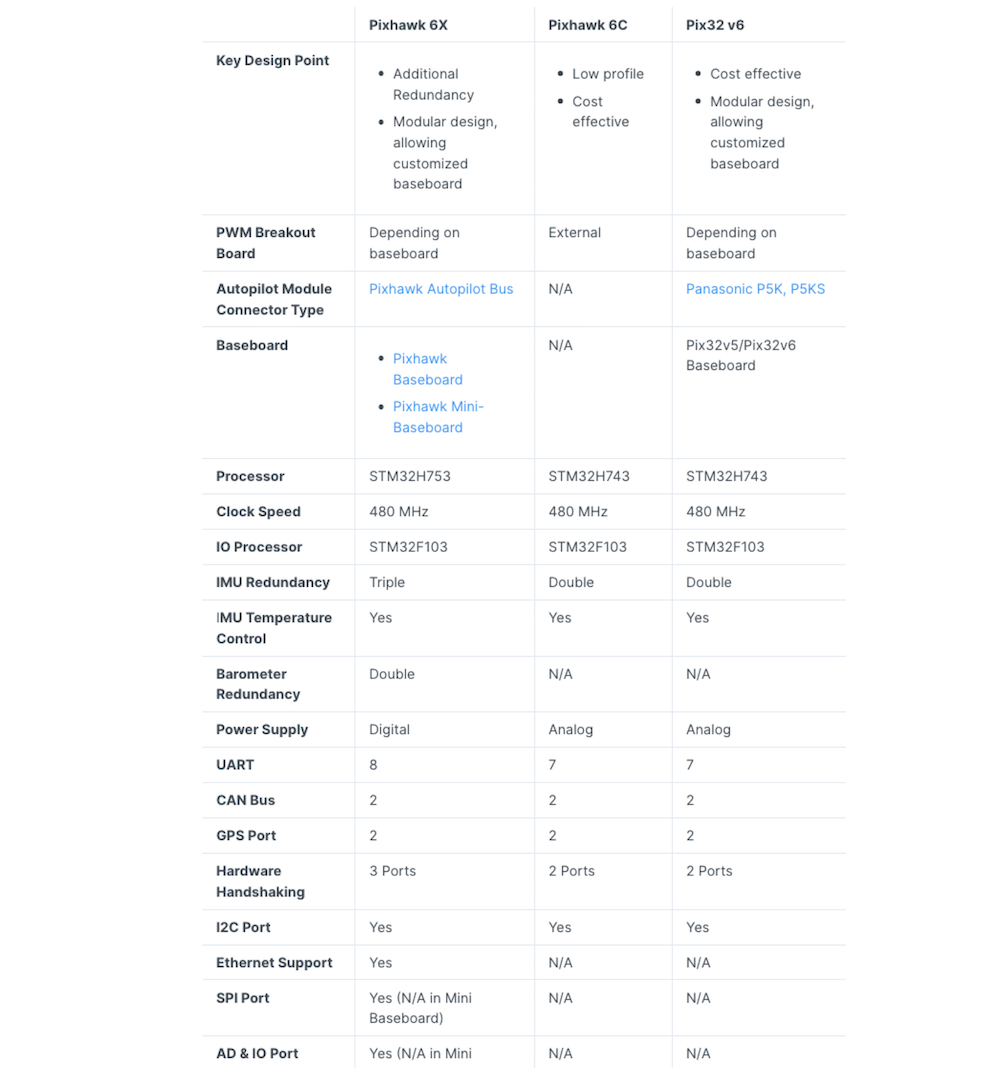
Processador STM32H753 de alto desempenho com velocidade de clock de até 480 MHz
Controlador de voo modular: IMU, FMU e sistema de base separados conectados por um conector Pixhawk® Autopilot Bus de 100 pinos e 50 pinos.
Redundância: 3 sensores IMU e 2 sensores de barômetro em barramentos separados
Domínios de redundância tripla: Domínios de sensores completamente isolados com barramentos separados e controle de potência separado
Sistema de isolamento de vibração recém-projetado para filtrar a vibração de alta frequência e reduzir o ruído para garantir leituras precisas
Interface Ethernet para integração de computador de missão de alta velocidade
As IMUs são controladas por temperatura por resistores de aquecimento integrados, permitindo a temperatura ideal de trabalho das IMUs.
O Pixhawk® 6X é a atualização mais recente da bem-sucedida família de controladores de voo Pixhawk®, baseada no Pixhawk® FMUv6X Open Standard e no Pixhawk® Autopilot Bus Standard.
Ele vem com o PX4 Autopilot® pré-instalado.
Dentro do Pixhawk® 6X, você pode encontrar um STM32H753 baseado em STMicroelectronics®, emparelhado com tecnologia de sensor da Bosch®, InvenSense®, dando a você flexibilidade e confiabilidade para controlar qualquer veículo autônomo, adequado para aplicações acadêmicas e comerciais .
O microcontrolador H7 do Pixhawk® 6X contém o núcleo Arm® Cortex®-M7 rodando até 480 MHz, possui 2 MB de memória flash e 1 MB de RAM. O piloto automático PX4 aproveita o aumento de potência e RAM. Graças ao poder de processamento atualizado, os desenvolvedores podem ser mais produtivos e eficientes em seu trabalho de desenvolvimento, permitindo algoritmos e modelos complexos.
O padrão aberto FMUv6X inclui IMUs de alto desempenho e baixo ruído a bordo, projetadas para melhor estabilização. IMU redundante tripla e barômetro redundante duplo em barramentos separados. Quando o piloto automático PX4 detecta uma falha de sensor, o sistema alterna perfeitamente para outro para manter a confiabilidade do controle de voo.
Um LDO independente alimenta cada conjunto de sensores com controle de energia independente. Um sistema de isolamento de vibração para filtrar a vibração de alta frequência e reduzir o ruído para garantir leituras precisas, permitindo que os veículos alcancem melhores desempenhos gerais de voo.
O barramento de sensor externo (SPI5) possui duas linhas de seleção de chip e sinais prontos para dados para sensores adicionais e carga útil com interface SPI e com um Microchip Ethernet PHY integrado, agora é possível a comunicação de alta velocidade com computadores de missão via Ethernet.
O Pixhawk® 6X é perfeito para desenvolvedores em laboratórios de pesquisa corporativos, startups, acadêmicos (pesquisa, professores, alunos) e aplicações comerciais.