O PiPER é um braço robótico leve com seis motores de junta integrados para controle suave e preciso.
Pesando apenas 4,2 kg, ele facilmente lida com uma carga útil de 1,5 kg e é feito de materiais duráveis, porém leves, para uso versátil em vários ambientes.
O PiPER da AgileX Robotics é um braço robótico leve e poderoso que se destaca em precisão, velocidade e adaptabilidade.
Compacto e fácil de usar, ele se encaixa perfeitamente em qualquer ambiente, capacitando os usuários a inovar e alcançar mais com facilidade.
Carga útil leve e estável
O PiPER é compacto e potente, suportando uma carga útil estável de 1,5 kg e mantendo a agilidade em movimento.
Controle de precisão
Equipado com motores de junta avançados e planejamento de trajetória, o PiPER proporciona uma operação precisa e suave, perfeita para tarefas detalhadas.
Adaptabilidade a ambientes adversos
Projetado para operar em condições extremas que variam de -20℃ a 50℃, o PiPER tem desempenho confiável em ambientes difíceis.
Interface de usuário intuitiva
Nossa moderna interface baseada em tablet utiliza um sistema poderoso, permitindo que os usuários criem e controlem seus aplicativos sem esforço.
Suporte de código aberto
O PiPER pode ser controlado via API Python e suporta ROS1 e ROS2, oferecendo flexibilidade para desenvolvedores e garantindo integração suave em uma variedade de projetos.
A automação industrial geralmente vem com um preço alto que mantém muitos pequenos fabricantes à margem.
No entanto, o novo braço robótico da PiPER visa mudar essa narrativa com seu preço competitivo - uma fração do que os robôs industriais tradicionais custam.
Embora o preço certamente chame a atenção, a verdadeira questão é se esse braço robótico acessível pode fornecer a precisão e a confiabilidade que as aplicações industriais exigem.
Além do custo atraente, esse braço robótico promete recursos de nível profissional, como integração ROS, suporte à programação Python e controle preciso de movimento.
Nesta análise prática, examinaremos o que o braço robótico PiPER realmente oferece, testaremos seu desempenho no mundo real e ajudaremos você a decidir se é o investimento certo para suas necessidades de automação.
Braço robótico PiPER: especificações principais
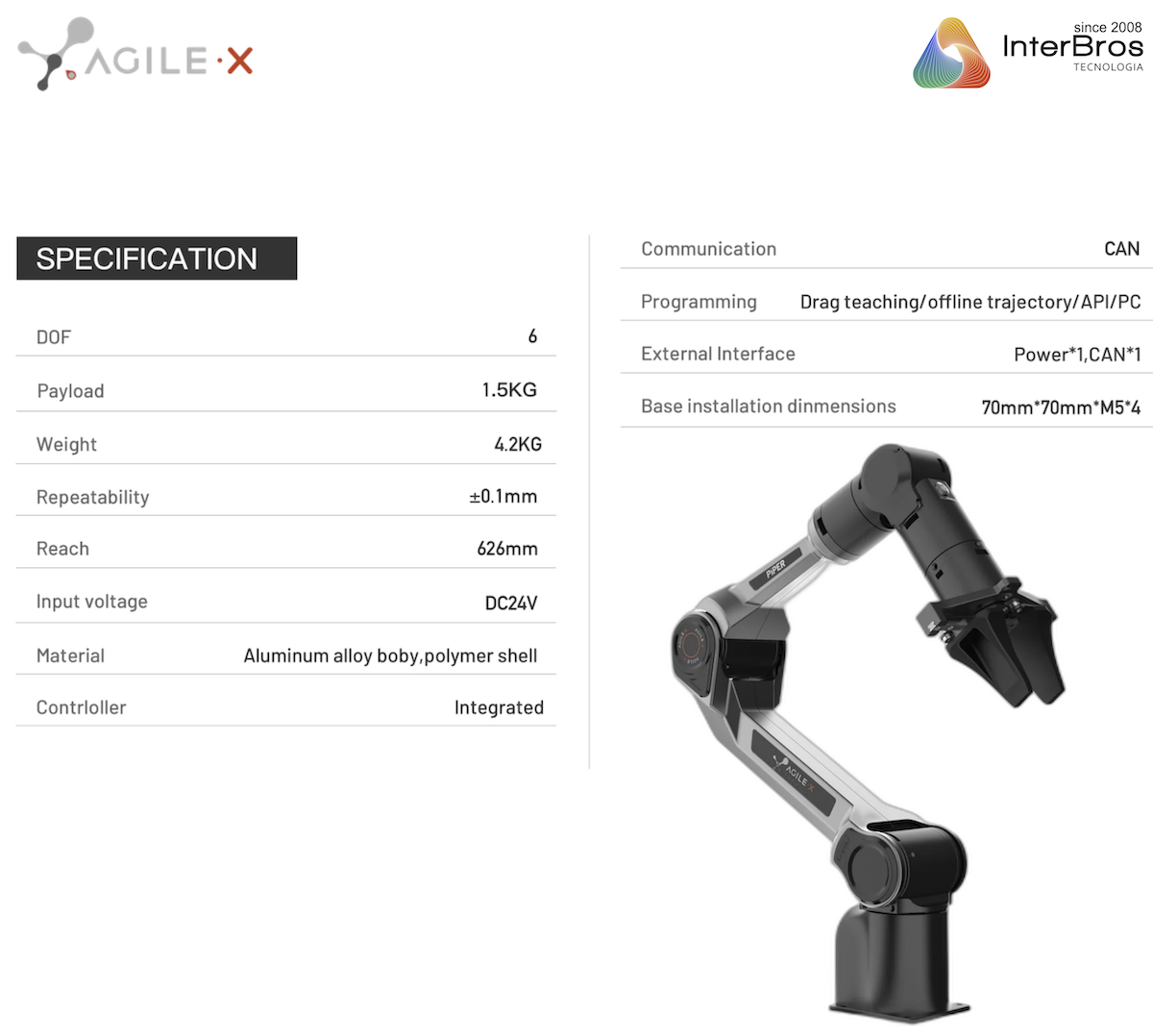
O braço robótico PiPER se destaca com seu design sofisticado de seis eixos, oferecendo controle preciso e versatilidade em várias aplicações. Em sua essência, este braço robótico oferece recursos de nível profissional por meio de seus motores de junta integrados 1.
Principais recursos técnicos
A proeza técnica do braço começa com sua impressionante relação carga-peso. Apesar de pesar apenas 4,2 kg, ele lida eficientemente com cargas de até 1,5 kg 2. Além disso, o braço atinge uma repetibilidade notável de ± 0,1 mm 3, garantindo desempenho consistente em tarefas repetitivas.
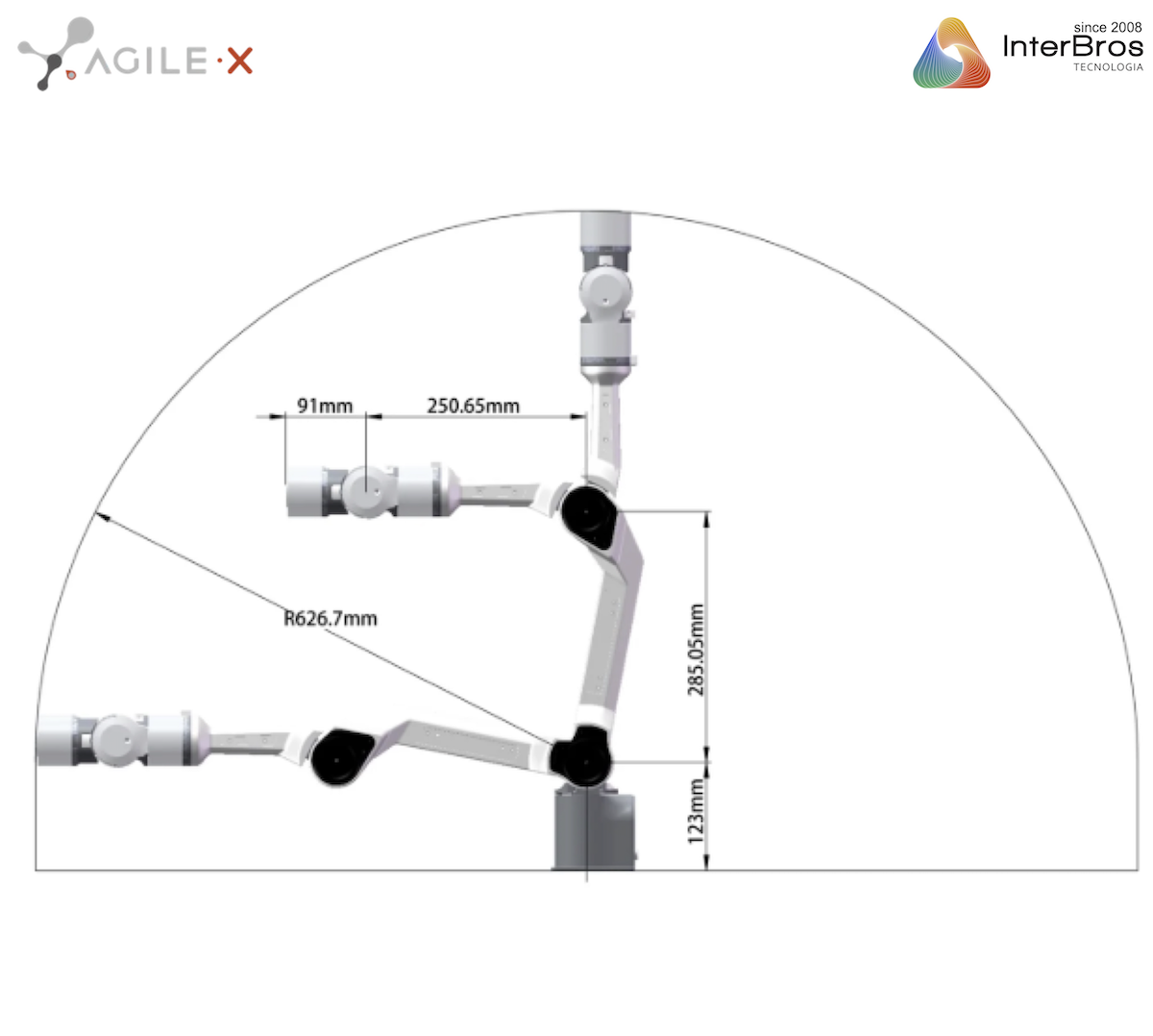
Cada junta demonstra capacidades excepcionais de alcance e velocidade. Especificamente, a junta base (J1) gira ± 154°, enquanto a junta do ombro (J2) se move de 0° a 195°. Além disso, a articulação do cotovelo (J3) abrange -175° a 0°, complementada pelas articulações do pulso (J4, J5, J6) que fornecem intervalos de ±106°, ±75° e ±100°, respectivamente 4.
O alcance do braço se estende a 626 mm 2, tornando-o adequado para uma ampla gama de aplicações industriais. Notavelmente, o controlador integrado e o sistema de comunicação CAN garantem uma operação suave e controle preciso do movimento 3.
Design e qualidade de construção
A construção do PiPER apresenta engenharia cuidadosa por meio de sua combinação de estrutura de liga de alumínio e concha de polímero 3. Esta escolha de design equilibra notavelmente a durabilidade com a otimização do peso, contribuindo para a eficiência geral do braço.
Um dos aspectos mais impressionantes do design do PiPER é sua adaptabilidade ambiental. O braço opera de forma confiável em temperaturas que variam de -20°C a 50°C 1, tornando-o adequado para diversos ambientes industriais. A instalação da base utiliza um padrão de montagem robusto de 70 mm x 70 mm com rosca M5 3, garantindo estabilidade durante a operação.
O design do controlador integrado elimina a necessidade de caixas de controle externas, reduzindo consequentemente a complexidade da configuração. Particularmente notável é a eficiência energética do braço, mantendo o consumo de energia abrangente abaixo de 40 W durante a operação normal, com consumo máximo de energia não excedendo 120 W 4.
Experiência de configuração e programação
A configuração do braço robótico PiPER requer atenção metódica aos detalhes, começando com a instalação adequada da base. O processo de montagem começa com a fixação da base usando quatro parafusos M5 em um padrão de espaçamento de furos de 70 mm 5.
Processo de montagem inicial
A montagem começa com um posicionamento estável do braço robótico. A instalação da base requer atenção cuidadosa aos furos roscados M5 pré-perfurados 5. Ao conectar componentes, os conectores apresentam um design de polaridade reversa com alinhamento de ponto vermelho para orientação adequada 6.
Etapas de instalação do software
A automação industrial geralmente vem com um preço alto que mantém muitos pequenos fabricantes à margem. No entanto, o novo braço robótico da PiPER visa mudar essa narrativa com seu preço de US$ 2.499 - uma fração do que os robôs industriais tradicionais custam. Embora o preço certamente chame a atenção, a verdadeira questão é se esse braço robótico acessível pode fornecer a precisão e a confiabilidade que as aplicações industriais exigem. Além do custo atraente, esse braço robótico promete recursos de nível profissional, como integração ROS, suporte à programação Python e controle preciso de movimento. Nesta análise prática, examinaremos o que o braço robótico PiPER realmente oferece, testaremos seu desempenho no mundo real e ajudaremos você a decidir se é o investimento certo para suas necessidades de automação.
Braço robótico PiPER: especificações principais
O braço robótico PiPER se destaca com seu design sofisticado de seis eixos, oferecendo controle preciso e versatilidade em várias aplicações. Em sua essência, este braço robótico oferece recursos de nível profissional por meio de seus motores de junta integrados 1.
Principais recursos técnicos
A proeza técnica do braço começa com sua impressionante relação carga-peso. Apesar de pesar apenas 4,2 kg, ele lida eficientemente com cargas de até 1,5 kg 2. Além disso, o braço atinge uma repetibilidade notável de ± 0,1 mm 3, garantindo desempenho consistente em tarefas repetitivas.
Cada junta demonstra capacidades excepcionais de alcance e velocidade. Especificamente, a junta base (J1) gira ± 154°, enquanto a junta do ombro (J2) se move de 0° a 195°. Além disso, a articulação do cotovelo (J3) abrange -175° a 0°, complementada pelas articulações do pulso (J4, J5, J6) que fornecem intervalos de ±106°, ±75° e ±100°, respectivamente 4.
O alcance do braço se estende a 626 mm 2, tornando-o adequado para uma ampla gama de aplicações industriais. Notavelmente, o controlador integrado e o sistema de comunicação CAN garantem uma operação suave e controle preciso do movimento 3.
Design e qualidade de construção
A construção do PiPER apresenta engenharia cuidadosa por meio de sua combinação de estrutura de liga de alumínio e concha de polímero 3. Esta escolha de design equilibra notavelmente a durabilidade com a otimização do peso, contribuindo para a eficiência geral do braço.
Um dos aspectos mais impressionantes do design do PiPER é sua adaptabilidade ambiental. O braço opera de forma confiável em temperaturas que variam de -20°C a 50°C 1, tornando-o adequado para diversos ambientes industriais. A instalação da base utiliza um padrão de montagem robusto de 70 mm x 70 mm com rosca M5 3, garantindo estabilidade durante a operação.
O design do controlador integrado elimina a necessidade de caixas de controle externas, reduzindo consequentemente a complexidade da configuração. Particularmente notável é a eficiência energética do braço, mantendo o consumo de energia abrangente abaixo de 40 W durante a operação normal, com consumo máximo de energia não excedendo 120 W 4.
Experiência de configuração e programação
A configuração do braço robótico PiPER requer atenção metódica aos detalhes, começando com a instalação adequada da base. O processo de montagem começa com a fixação da base usando quatro parafusos M5 em um padrão de espaçamento de furos de 70 mm 5.
Processo de montagem inicial
A montagem começa com um posicionamento estável do braço robótico. A instalação da base requer atenção cuidadosa aos furos roscados M5 pré-perfurados 5. Ao conectar componentes, os conectores apresentam um design de polaridade reversa com alinhamento de ponto vermelho para orientação adequada 6.
Etapas de instalação do software
O processo de configuração do software começa com os requisitos básicos do sistema. O PiPER opera em plataformas Windows 7 ou superiores 7. Após a instalação, os usuários ganham acesso a uma interface abrangente com:
Elementos de controle essenciais:
Botão de comunicação do braço robótico
Configuração de porcentagem de velocidade
Botão de parada de emergência
Modelo de simulação 3D
Função de biblioteca de trajetória
Configuração pela primeira vez
A configuração inicial envolve estabelecer comunicação entre o computador host e o braço robótico. A interface fornece dados de feedback em tempo real da rede externa 7. O sistema suporta pacotes de driver Python SDK e ROS1 para recursos avançados de programação 8.
Análise da curva de aprendizado
O processo de aprendizado se beneficia da interface de usuário intuitiva do PiPER, que simplifica a programação e a operação 7. Usuários iniciantes podem navegar pelas operações básicas usando o software de interação homem-máquina 8. A interface permite controle direto por meio de:
Monitoramento do status da junta
Ajustes de porcentagem de velocidade
Ferramentas de planejamento de trajetória 7
O sistema suporta vários métodos de controle, incluindo controle direto da junta e movimentos do sistema de coordenadas. Os usuários podem operar o braço por meio de vários quadros de coordenadas - base, ferramenta e coordenadas de espaço de trabalho definidas pelo usuário 9. Para movimentos precisos, a interface permite controle específico da junta e caminhos de movimento linear 9.
A abordagem de design modular simplifica a manutenção e as atualizações 7. Além disso, o sistema inclui recursos de segurança abrangentes, como funcionalidade de parada de emergência e recursos de monitoramento de status 7. Por meio do software do computador host, os operadores podem gerenciar com eficiência movimentos básicos e tarefas complexas de automação 10.
Testes de desempenho no mundo real
Testes de laboratório revelam capacidades impressionantes do braço robótico PiPER sob condições controladas. Por meio de ciclos de teste extensivos, o braço demonstra desempenho consistente em vários parâmetros operacionais.
Testes de precisão e exatidão
O PiPER atinge uma precisão de repetibilidade de ±0,1 mm em toda a sua amplitude de movimento 11. Este nível de precisão permanece estável mesmo ao manusear cargas úteis de até 1,5 kg 12. Na verdade, o braço mantém essa precisão por meio de seus servomotores integrados, que trabalham ativamente para manter a posição quando parados 13.
A precisão do braço decorre de seu avançado sistema de codificador, que fornece dados de posição exatos para cada eixo rotacional da junta 14. Posteriormente, isso permite que os servomotores executem posicionamento preciso e controle de velocidade em todos os movimentos. As instalações cinemáticas do sistema garantem alta repetibilidade e capacidades de simulação estendidas 15.
Controle de velocidade e movimento
Cada junta do PiPER demonstra capacidades de velocidade distintas, otimizadas para tipos específicos de movimento: